Sistema de navegación por posicionamiento Cap-3
 Sistema de navegación por posicionamiento Cap-3
Sistema de navegación por posicionamiento Cap-3
Fundamentos básicos
Navegación DME-DME y el diseño de aerovías
Diseño de un procedimiento
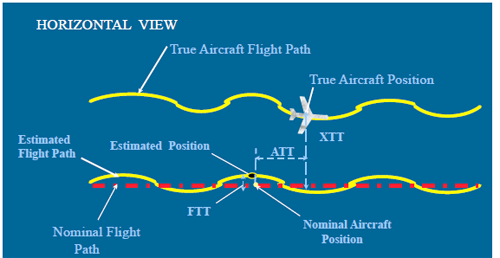
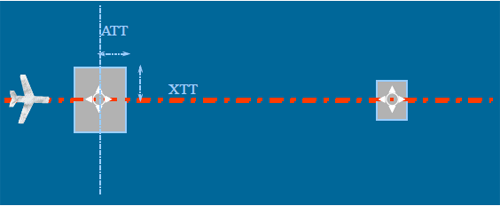
Errores 2-D: ATT (along-track tolerance) y XTT (cross-track tolerance).
Estos son los errores que se requieren para diseñar procedimientos RNAV.
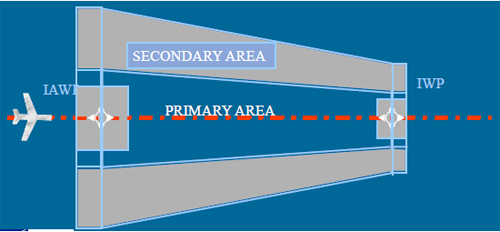
Se fija un corredor de seguridad en torno a la trayectoria que respete estos errores máximos.
Aparte de los errores procedentes del DME, otros errores que juegan un papel son (FTT=error técnico de vuelo) y el error de cálculo (ST=system tolerance).
Aunque el error depende de la posición relativa de los DMEs y el receptor, la norma editada por EUROCONTROL considera el peor caso posible y evita complicar las formulas con la geometría del problema.
Según la norma, hay que calcular:
![]()
Se toma ST = 0.25 nm, y el valor de FTT será:
· En ruta: FTT = 2nm.
· Acercamiento inicial e intermedio: FTT = 1nm.
· Despegue, acercamiento final FTT = 0,5nm.
Si sólo hay 2 DMEs multiplicar d por 1.29.
Los errores serán:
![]()
Aparte se añaden pequeños «buffers» para aumentar la seguridad de los procedimientos.
Usando los valores de XTT y ATT se pueden diseñar procedimientos RNAV.
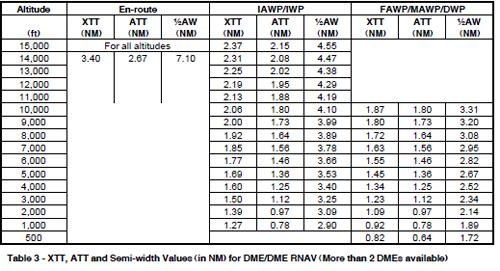
Los cálculos anteriores se pueden encontrar tabulados